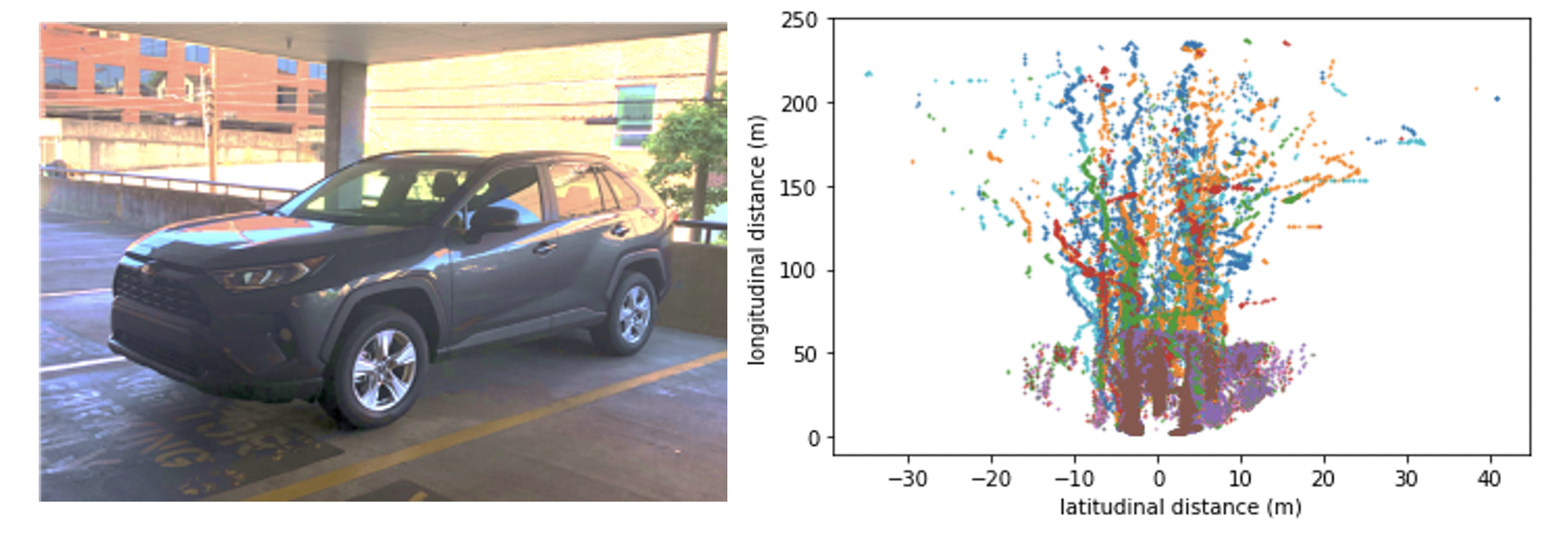
This project explores methods for model parameter estimation on a car-following model using data collected from Adaptive Cruise Control (ACC) enabled vehicles. The proposed methods are batch method least-squares and an online particle filter. Numerical experiments demonstrate the accuracy and computational performance of the methods relative to a commonly used simulation-based optimization approach. The methods are also assessed on empirical data collected from a 2019 model year ACC vehicle driven in a highway environment. Speed, space gap, and relative velocity data are recorded directly from the factory-installed radar unit via the vehicle’s CAN bus. The least-squares method has the fastest run-time performance, and is up to 3 orders of magnitude faster than other methods. The particle filter is faster than real-time, and therefore is suitable in streaming applications in which the datasets can grow arbitrarily large.
 Bridges to Prosperity (now Engineers in Action Bridge Program)
Bridges to Prosperity (now Engineers in Action Bridge Program)